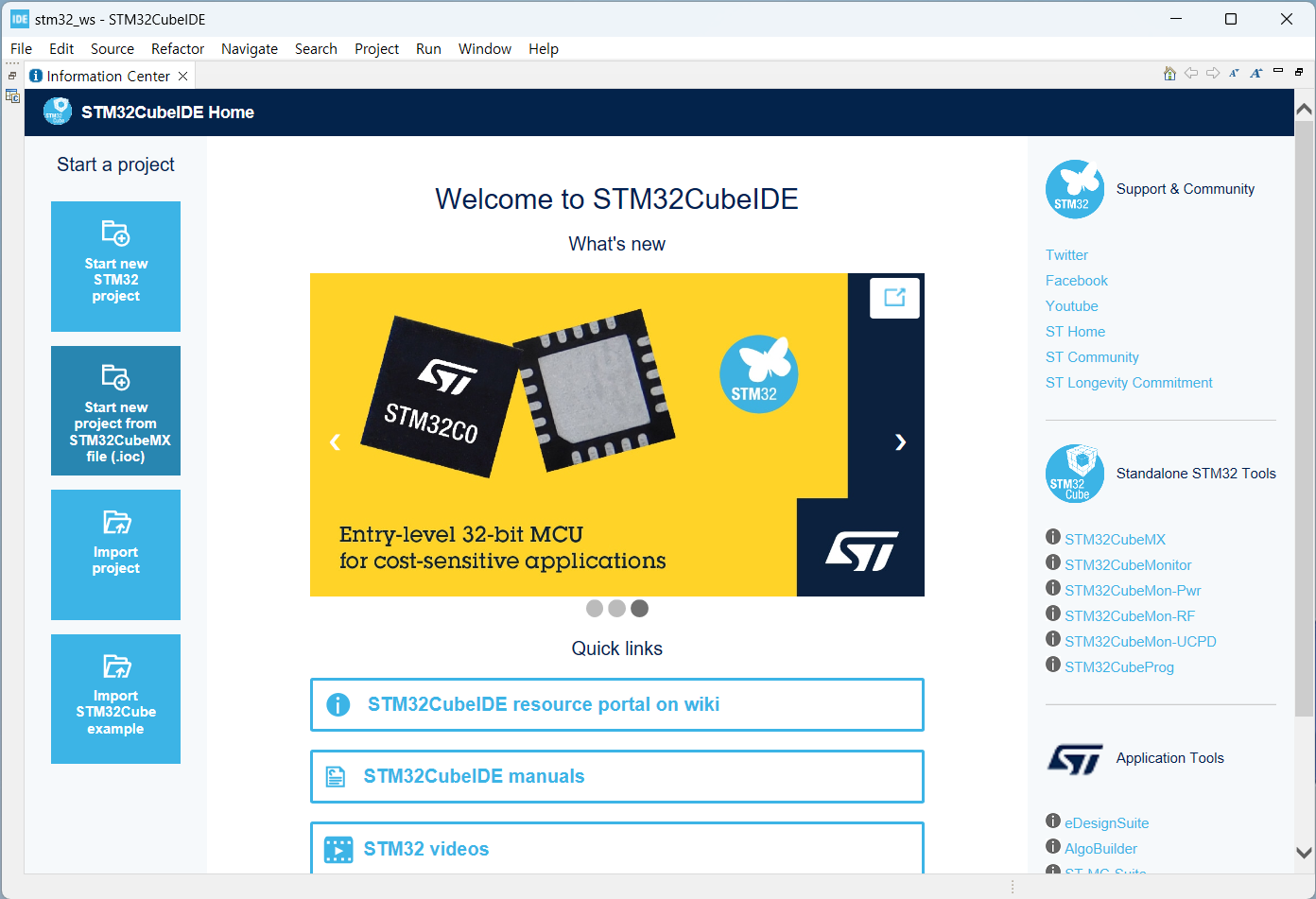
STM32 프로그램 개발을 위해 필요한 환경을 설정하는 과정에 대한 설명입니다. 아래 과정은 다음 환경에서 진행했습니다. Windows 11 Home 1. Java 설치하기 STM32 CubeIDE는 Eclipse 프로그램에 플러그인 형식으로 만들어진 개발 프로그램입니다. CubeIDE를 실행하기 위해서는 java를 설치해야 합니다. https://www.oracle.com/kr/java/technologies/downloads/#java11에 접속하면 아래와 같은 화면을 확인할 수 있습니다. (이때 오라클 계정에 로그인이 필요합니다. 회원 가입 후 로그인 하면 됩니다.) 'jdk-11.0.18_windows-x64_bin.exe'를 다운로드합니다. 다운로드한 설치파일을 실행해서 설치합니다. (모두 기본..