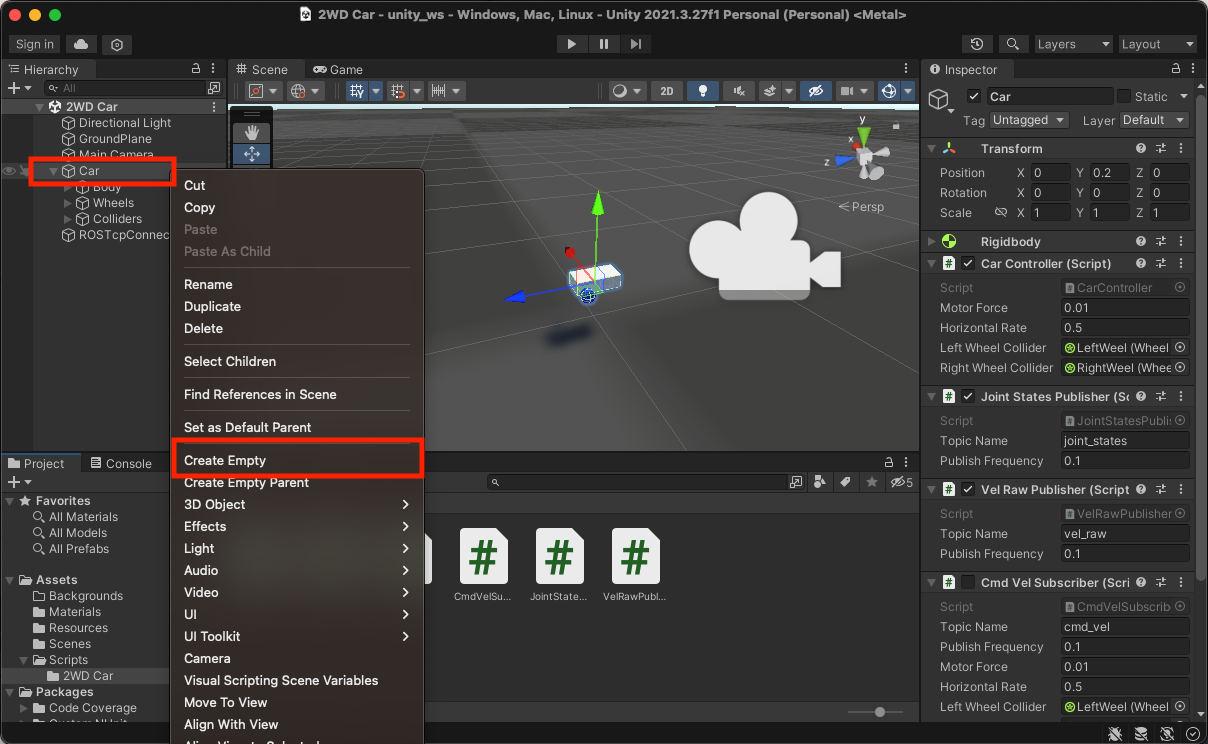
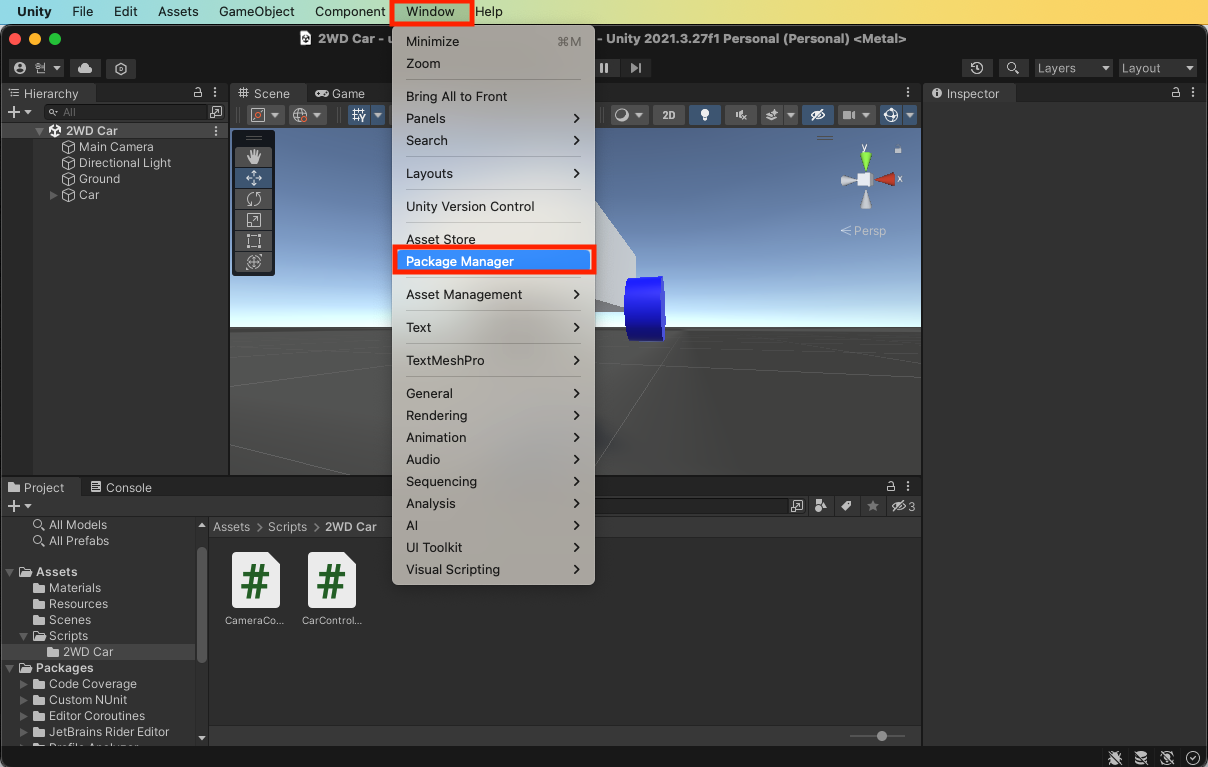
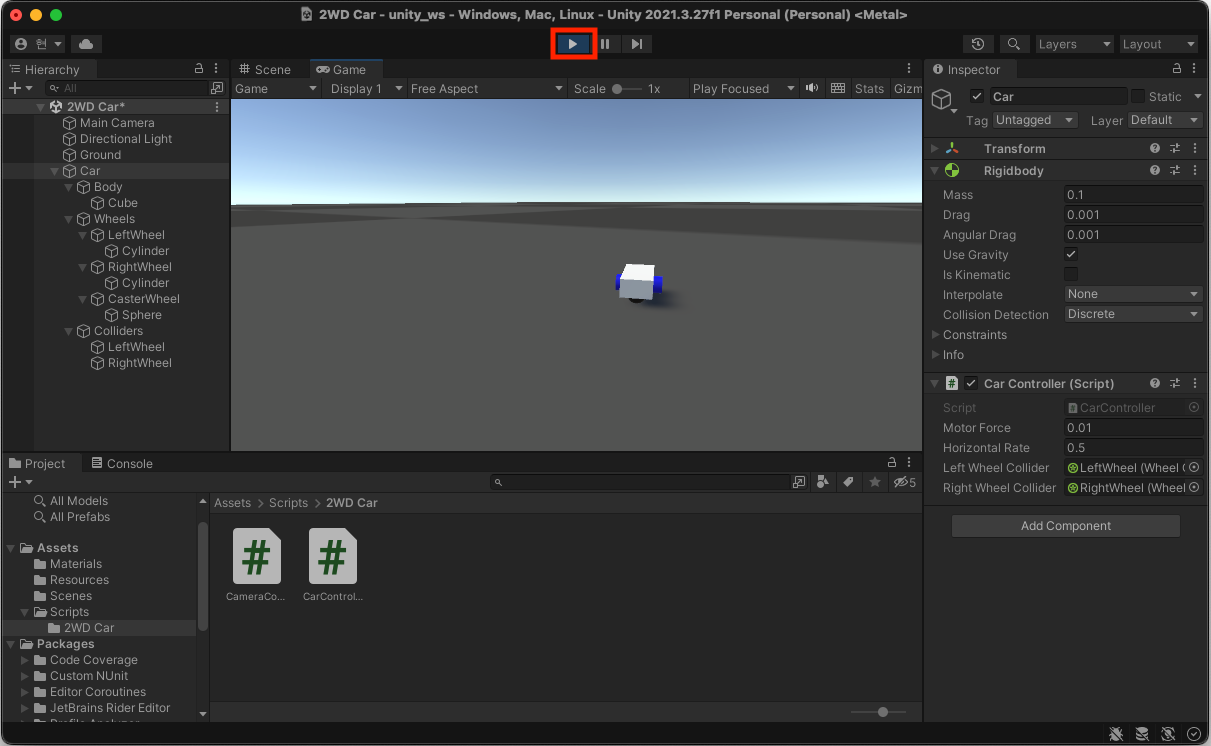
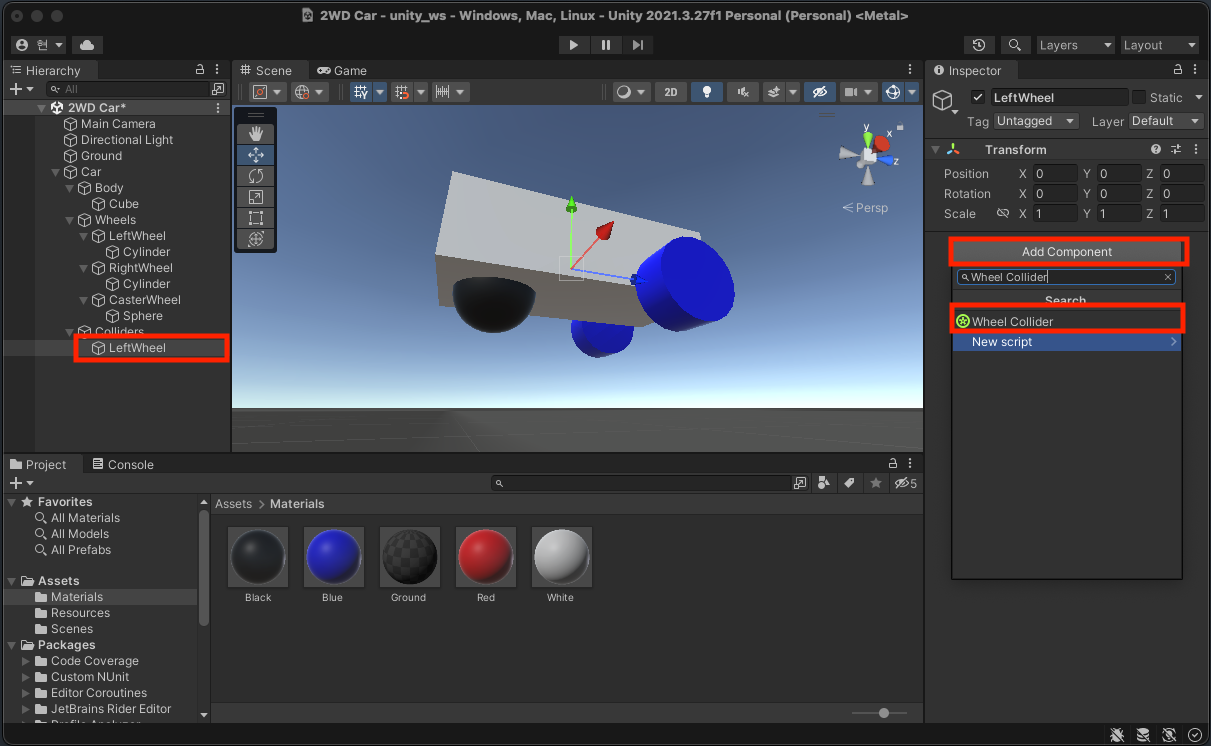
이번 포스팅은 URDF를 이용해 만든 로봇에 Unity 자동차 연결하기 (3) 과정을 통해서 만들어진 Unity 로봇에 카메라를 부착하고 ROS와 연동해 보는 과정입니다. 이 포스트는 다음 과정을 완료한 후에 참고하시길 바랍니다. URDF를 이용한 간단한 로봇 만들기 (1) URDF를 이용한 간단한 로봇 만들기 (2) URDF를 이용한 간단한 로봇 만들기 (3) URDF를 이용해 만든 로봇에 가상 자동차 연결하기 (1) URDF를 이용해 만든 로봇에 가상 자동차 연결하기 (2) URDF를 이용해 만든 로봇에 Unity 자동차 연결하기 (1) URDF를 이용해 만든 로봇에 Unity 자동차 연결하기 (2) URDF를 이용해 만든 로봇에 Unity 자동차 연결하기 (3) 1. Unity 로봇에 카메라 부착하..