이번 포스팅은 URDF를 이용해 만든 로봇에 가상 자동차 연결하기 (1) 과정을 통해서 만들어진 가상의 자동차가 주는 속도 정보를 기반으로 자동차의 현재 위치를 계산하고 그 결과를 Rviz에서 확인할 수 있는 기능을 만드는 과정입니다.
이 포스트는 다음 과정을 완료한 후에 참고하시길 바랍니다.
- URDF를 이용한 간단한 로봇 만들기 (1)
- URDF를 이용한 간단한 로봇 만들기 (2)
- URDF를 이용한 간단한 로봇 만들기 (3)
- URDF를 이용해 만든 로봇에 가상 자동차 연결하기 (1)
1. 회전변환행렬
- 아래 그림과 같이 임의의 점 P=(x,y)를 θ 만큼 회전한 점 P′=(x′,y′)를 어떻게 계산할 수 있을까요?

- 아래와 같은 회전변환행렬을 사용하면 P′=(x′,y′)를 구할 수 있습니다.
(x′y′)=(cosθ−sinθsinθcosθ)(xy)
- 회전변환행렬에 대한 증명은 위키백과 회전변환행렬을 참고하시면 확인할 수 있습니다.
- 아래 그림과 같이 자동차의 위치가 P(g)1=(x(g)1,y(g)1,θ(g)z1)=(4,2,π/2)의 위치에서 자동차를 기준으로 x 방향으로 3 미터, y 방향으로 1 미터 반시계 방향으로 π/6 회전한 경우를 가정해 보겠습니다. 이와 같은 경우 회전행렬변환을 이용해서 자동차의 위치를 계산할 수 있습니다.
- 자동차의 위치를 계산하는 수식은 다음과 같습니다.
(x(g)2y(g)2θ(g)z2)=(x(g)1y(g)1θ(g)z1)+(cosθ(g)z1−sinθ(g)z10sinθ(g)z1cosθ(g)z10001)(Δx(c)Δy(c)Δθ(c)z)
- 위 식에 값을 넣어 계산하면 아래와 같습니다.
(x(g)2y(g)2θ(g)z2)=(42π/2)+(0−10100001)(31π/6)=(352π/3)
- 이와 같은 방식으로 로봇의 위치를 계산하는 방식을 Odometry라고 합니다.
2. car_odom package 생성 및 설정하기
- Odometry를 직접 구현하는 절차입니다.
- 터미널에서 아래 명령을 실행해서 car_odom package를 생성합니다. 아래 명령에서 build_type을 C++ 형식으로 지정했는데 이유는 python으로 처리할 경우 실행에 지연이 발생해서 계산이 부정확해지는 이슈가 있기 때문에 상대적으로 빠른 C++로 기능을 만들기 위해서입니다.
$ cd ~/Workspace/ros_ws/src/
$ ros2 pkg create --build-type ament_cmake car_odom- 'src/car_odom/package.xml' 파일을 아래와 같이 편집합니다.
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>car_odom</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="cchyun@todo.todo">cchyun</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<depend>geometry_msgs</depend>
<depend>rclcpp</depend>
<depend>tf2</depend>
<depend>tf2_ros</depend>
<depend>nav_msgs</depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>- 'src/car_odom/CMakeLists.txt' 파일을 아래와 같이 편집합니다.
cmake_minimum_required(VERSION 3.8)
project(car_odom)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
find_package(tf2 REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(nav_msgs REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(rclcpp REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
add_executable(car_odom src/car_odom.cpp)
ament_target_dependencies(car_odom rclcpp tf2 tf2_ros nav_msgs geometry_msgs)
install(TARGETS
car_odom
DESTINATION lib/${PROJECT_NAME}
)
ament_package()3. car_odom 코드
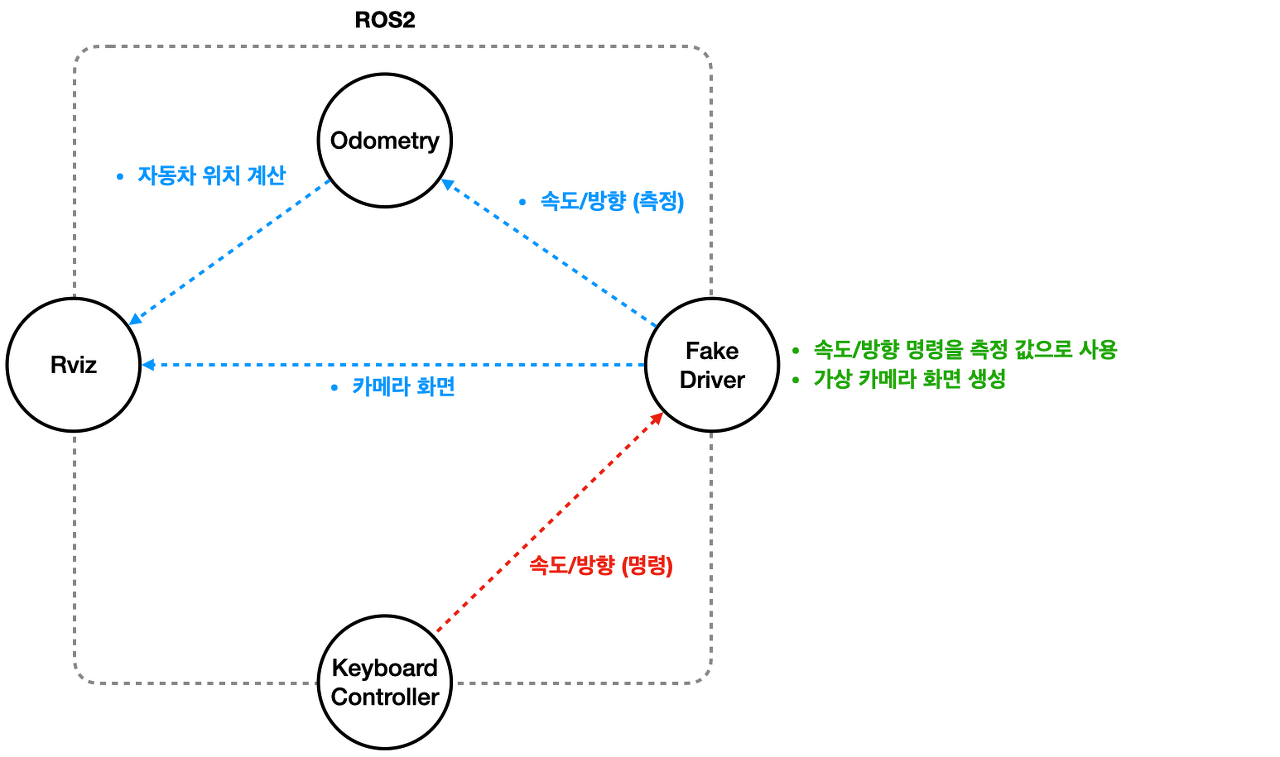
- Odometry는 아래 그림과 같이 Driver에서 속도/방향에 대한 측정값을 보내면 이 값을 기준으로 회전변환행렬을 이용해서 자동차의 실제 위치를 계산하는 역할을 수행합니다.
- 'src/car_odom/src/car_odom.cpp' 파일을 만들고 아래와 같이 편집합니다.
#include <rclcpp/rclcpp.hpp>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2_ros/transform_broadcaster.h>
#include <geometry_msgs/msg/twist_stamped.hpp>
#include <nav_msgs/msg/odometry.hpp>
using std::placeholders::_1;
class CarOdom:public rclcpp::Node
{
private:
rclcpp::Subscription<geometry_msgs::msg::TwistStamped>::SharedPtr sub_vel_raw;
std::unique_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster;
double scale_x = 1.0;
double scale_y = 1.0;
double scale_z = 1.0;
double delta_time = 0.0;
double vel_x = 0.0;
double vel_y = 0.0;
double vel_z = 0.0;
double delta_x = 0.0;
double delta_y = 0.0;
double delta_z = 0.0;
double pos_x = 0.0;
double pos_y = 0.0;
double pos_z = 0.0;
rclcpp::Time last_time;
geometry_msgs::msg::TransformStamped tf;
public:
CarOdom() : Node("car_odom") {
this->declare_parameter<double>("scale_x", 1.0);
this->declare_parameter<double>("scale_y", 1.0);
this->declare_parameter<double>("scale_z", 1.0);
this->get_parameter<double>("scale_x", scale_x);
this->get_parameter<double>("scale_y", scale_y);
this->get_parameter<double>("scale_z", scale_z);
tf.header.frame_id = "odom";
tf.child_frame_id = "base_link";
tf_broadcaster = std::make_unique<tf2_ros::TransformBroadcaster>(*this);
sub_vel_raw = this->create_subscription<geometry_msgs::msg::TwistStamped>("vel_raw", 10, std::bind(&CarOdom::vel_raw_callback, this, _1));
}
private:
void vel_raw_callback(const std::shared_ptr<geometry_msgs::msg::TwistStamped> msg) {
// delta time
rclcpp::Time curr_time = msg->header.stamp;
if (last_time.seconds() == 0) {
last_time = curr_time;
return;
}
delta_time = (curr_time - last_time).seconds();
last_time = curr_time;
// recv value
vel_x = msg->twist.linear.x * scale_x;
vel_y = msg->twist.linear.y * scale_y;
vel_z = msg->twist.angular.z * scale_z;
// delta value
delta_x = (vel_x * cos(pos_z) - vel_y * sin(pos_z)) * delta_time;
delta_y = (vel_x * sin(pos_z) + vel_y * cos(pos_z)) * delta_time;
delta_z = vel_z * delta_time;
// position value
pos_x += delta_x;
pos_y += delta_y;
pos_z += delta_z;
// Euler to Quaternion
tf2::Quaternion quaternion;
quaternion.setRPY(0.00, 0.00, pos_z);
// publish tf
tf.header.stamp = curr_time;
tf.transform.translation.x = pos_x;
tf.transform.translation.y = pos_y;
tf.transform.translation.z = 0.0;
tf.transform.rotation.x = quaternion.x();
tf.transform.rotation.y = quaternion.y();
tf.transform.rotation.z = quaternion.z();
tf.transform.rotation.w = quaternion.w();
tf_broadcaster->sendTransform(tf);
}
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<CarOdom>());
rclcpp::shutdown();
return 0;
}- 위 코드에서 63 ~ 65라인 코드가 회전변화행렬을 이용해서 차량의 위치를 계산하는 코드입니다.
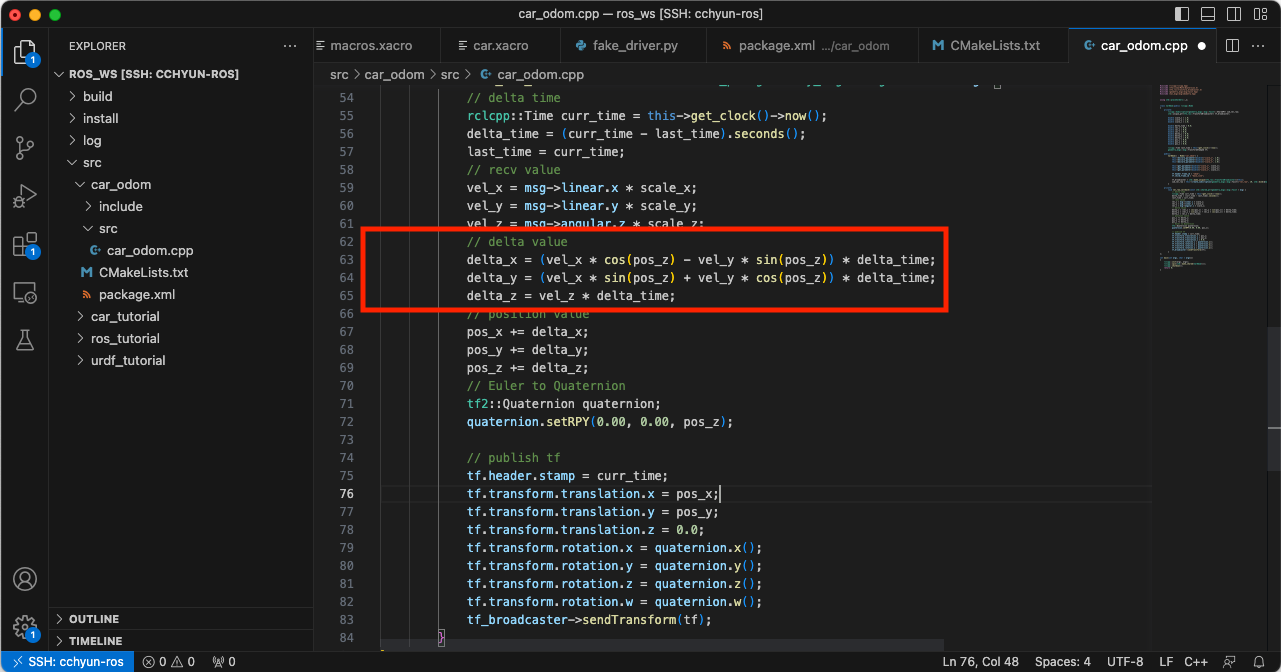
- 이렇게 변환된 좌표를 tf Topic을 이용해서 전달합니다.
4. car_odom 테스트
- 새로 추가한 car_odom을 테스트하는 과정입니다.
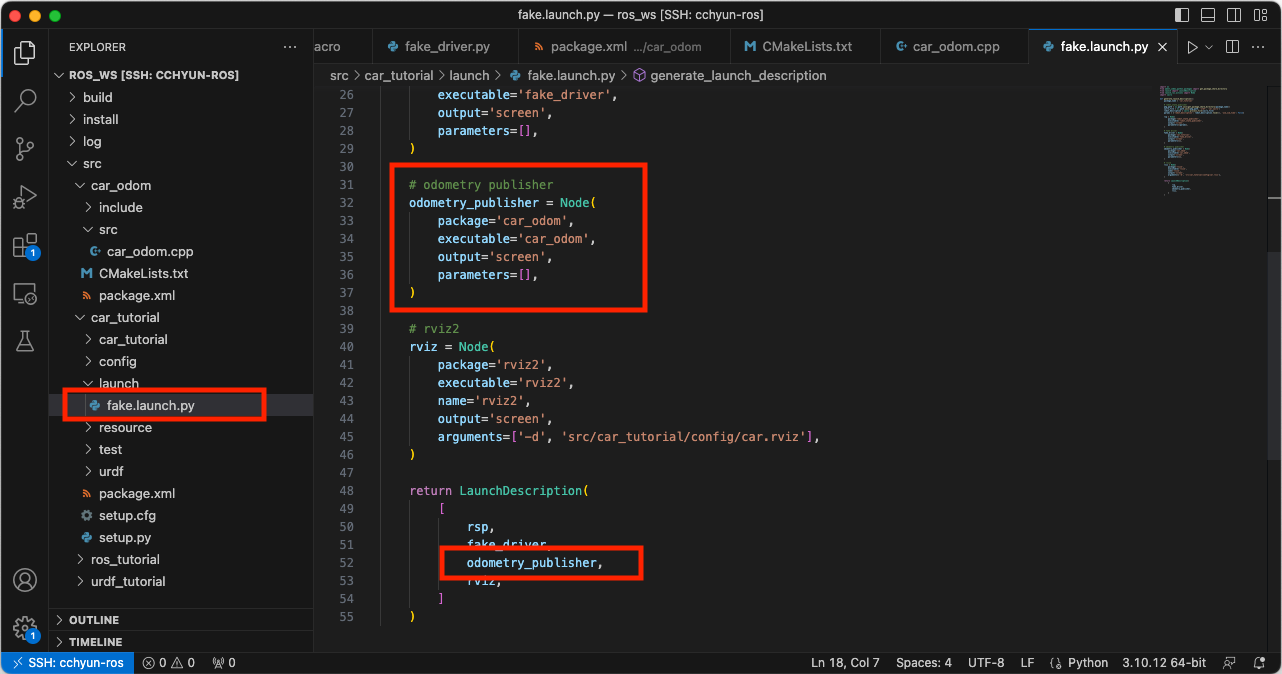
- 'src/car_tutorial/launch/fake.launch.py' 파일을 아래와 같이 편집합니다. car_odom Node가 실행되도록 추가했습니다.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
import xacro
def generate_launch_description():
package_name = 'car_tutorial'
# robot_state_publisher
pkg_path = os.path.join(get_package_share_directory(package_name))
xacro_file = os.path.join(pkg_path, 'urdf', 'car.xacro')
robot_description = xacro.process_file(xacro_file)
params = {'robot_description': robot_description.toxml(), 'use_sim_time': False}
rsp = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
output='screen',
parameters=[params],
)
# fake driver
fake_driver = Node(
package='car_tutorial',
executable='fake_driver',
output='screen',
parameters=[],
)
# odometry publisher
odometry_publisher = Node(
package='car_odom',
executable='car_odom',
output='screen',
parameters=[],
)
# rviz2
rviz = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
arguments=['-d', 'src/car_tutorial/config/car.rviz'],
)
return LaunchDescription(
[
rsp,
fake_driver,
odometry_publisher,
rviz,
]
)
- 첫 번째 터미널에서 아래 명령을 실행합니다.
$ cd ~/Workspace/ros_ws
$ colcon build --symlink-install
$ source install/setup.bash
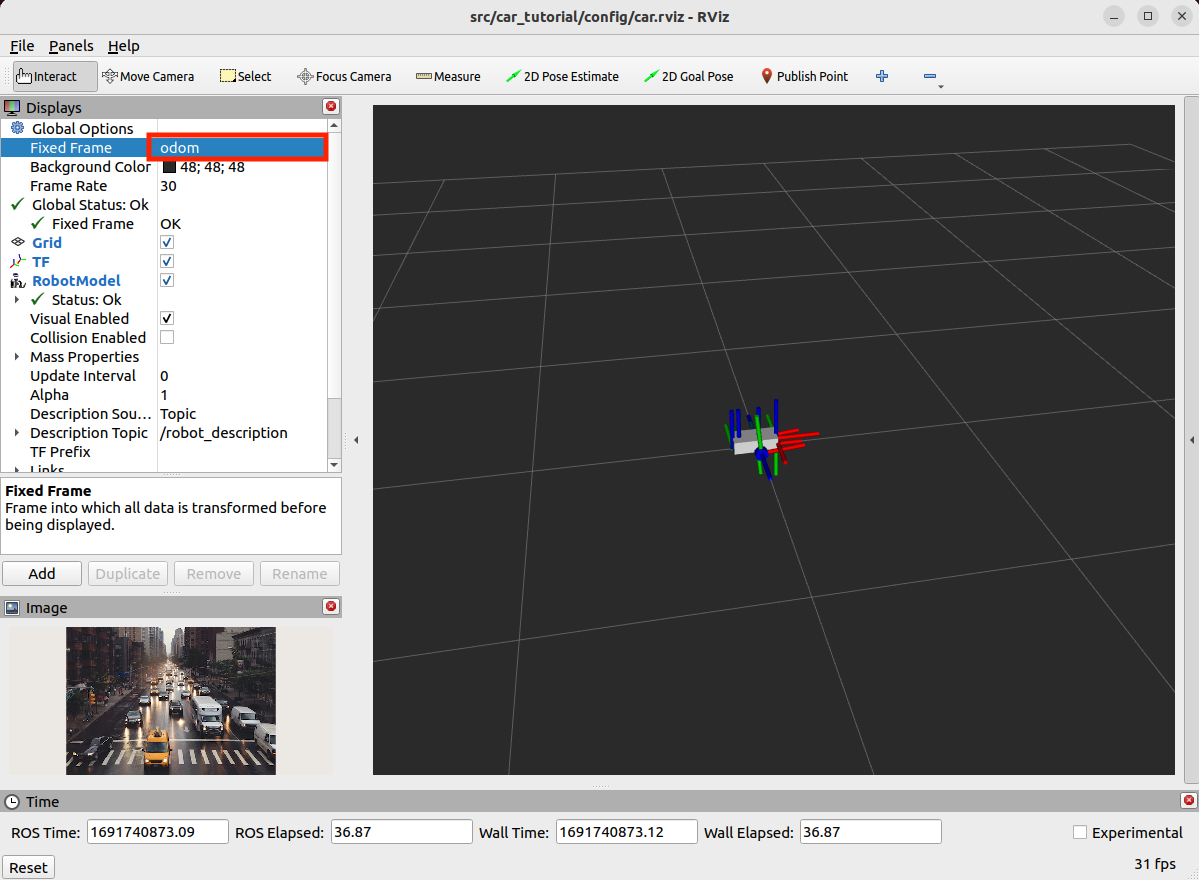
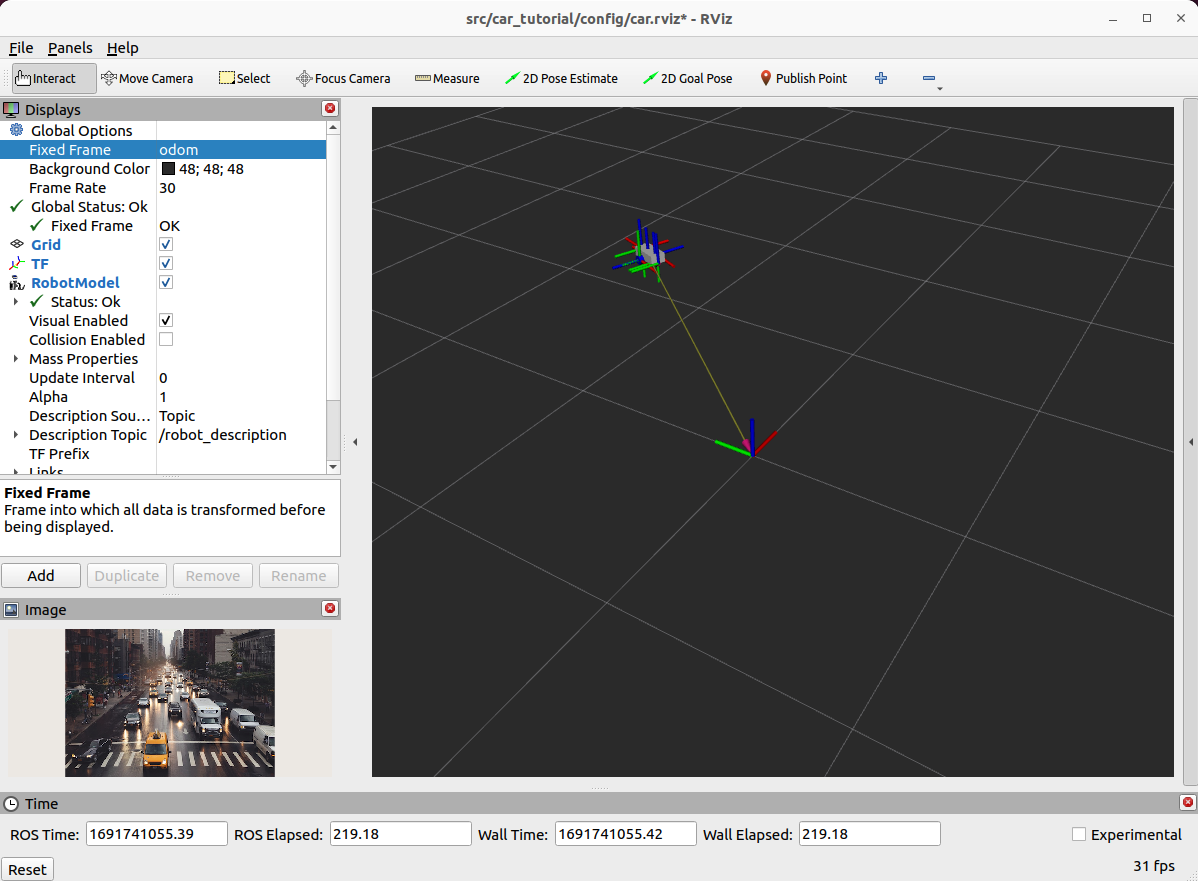
$ ros2 launch car_tutorial fake.launch.py- Rviz에서 Fixed Frame을 'odom'으로 변경합니다.
- 두 번째 터미널에서 아래 명령을 실행합니다.
$ ros2 run teleop_twist_keyboard teleop_twist_keyboard- 두 번째 터미널에서 키를 입력해서 자동차를 조정합니다. 아래 그림과 같이 자동차가 이동하는 것을 확인할 수 있습니다. car_odom Node에서 계산한 차량의 위치를 Rviz가 표현하고 있는 겁니다.
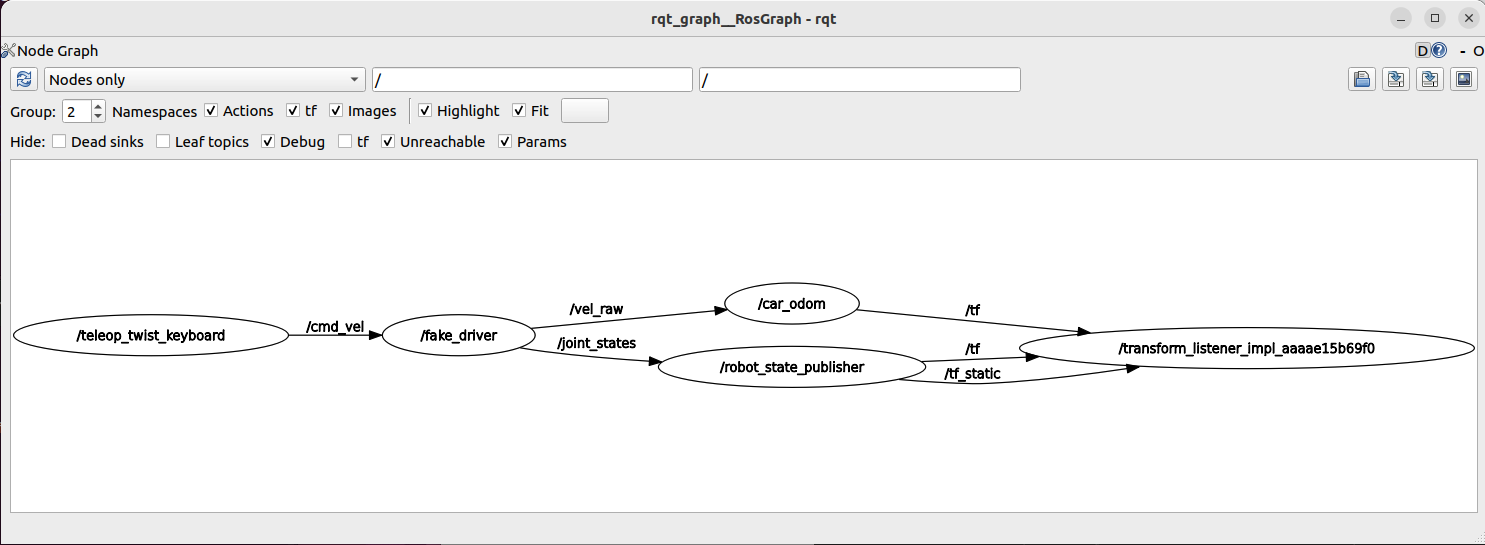
- 세 번째 터미널에서 아래 명령을 실행합니다.
$ rqt_graph- 아래 그림과 같이 car_odom이 fake_driver로부터 /cmd_raw Topic을 받아서 변환 후 /tf Topic을 Rviz에게 전달하는 것을 확인할 수 있습니다.
'로봇 > ROS' 카테고리의 다른 글
| URDF를 이용해 만든 로봇에 Unity 자동차 연결하기 (2) (0) | 2023.08.15 |
|---|---|
| URDF를 이용해 만든 로봇에 Unity 자동차 연결하기 (1) (0) | 2023.08.12 |
| URDF를 이용해 만든 로봇에 가상 자동차 연결하기 (1) (0) | 2023.08.09 |
| Gazebo를 이용해 Depth Camera 시뮬레이션 하기 (2) | 2023.07.22 |
| Gazebo를 이용해 Camera 시뮬레이션 하기 (0) | 2023.07.22 |