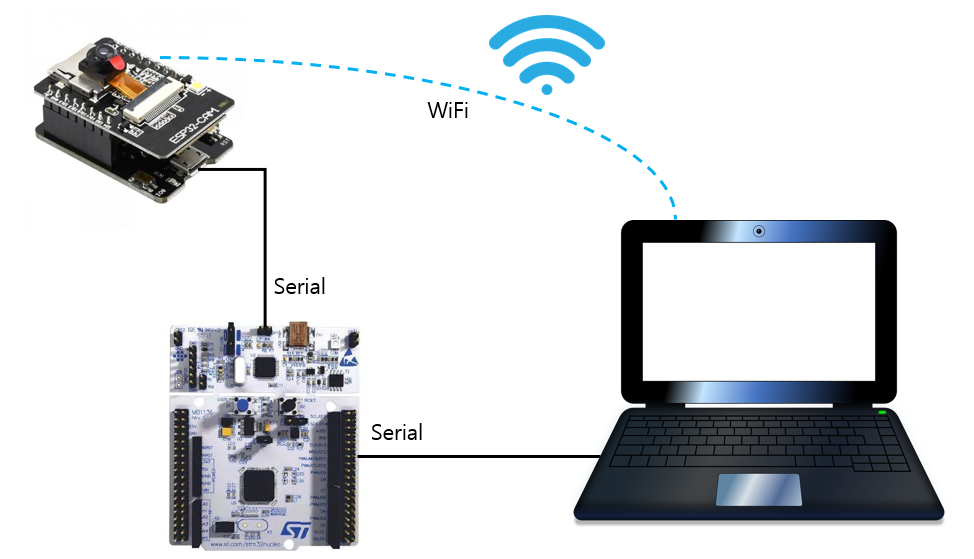
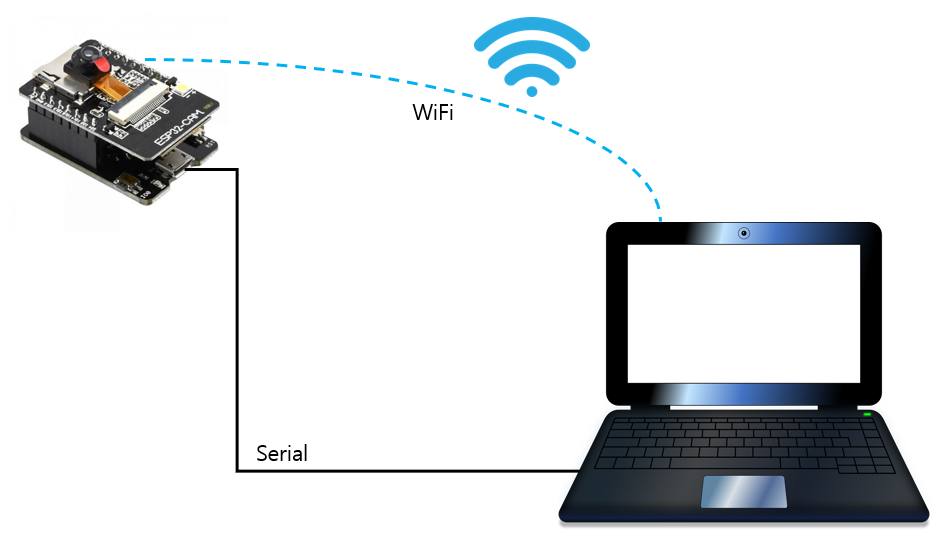
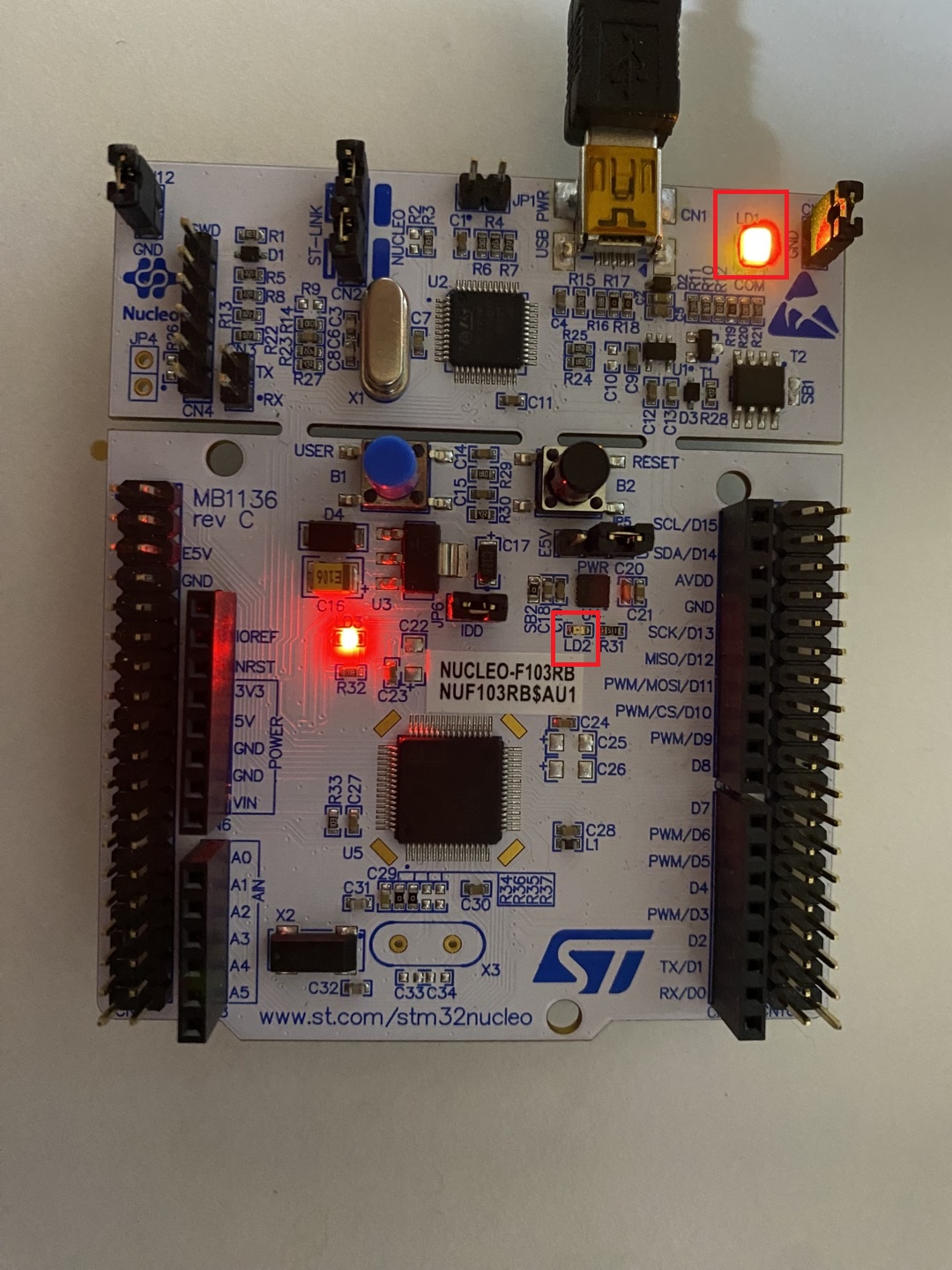
이 포스트는 ‘ESP32를 이용한 WiFi-Serial Bridge 만들기‘ 과정을 통해 프로그래밍된 ESP32에 STM32를 추가해서 WiFi – ESP32 Serial – STM32 Serial #1 – STM32 Serial #2 – PC로 명령어를 전달하는 WiFi-Serial Bridget 기능을 만들어 보는 과정에 대한 설명입니다. 이 포스트는 다음 과정을 완료한 후에 참고하시길 바랍니다. ESP32를 이용한 WiFi-Serial Bridge 만들기 이전 과정에 추가된 환경은 다음과 같습니다. STM32CubeIDE-1.12.0 STM32 NUCLEO-F103RB 보드 Tera Term-4.106 1. WiFi-Serial Bridge 설명 WiFi-Serial Bridge는 ESP32 WiF..