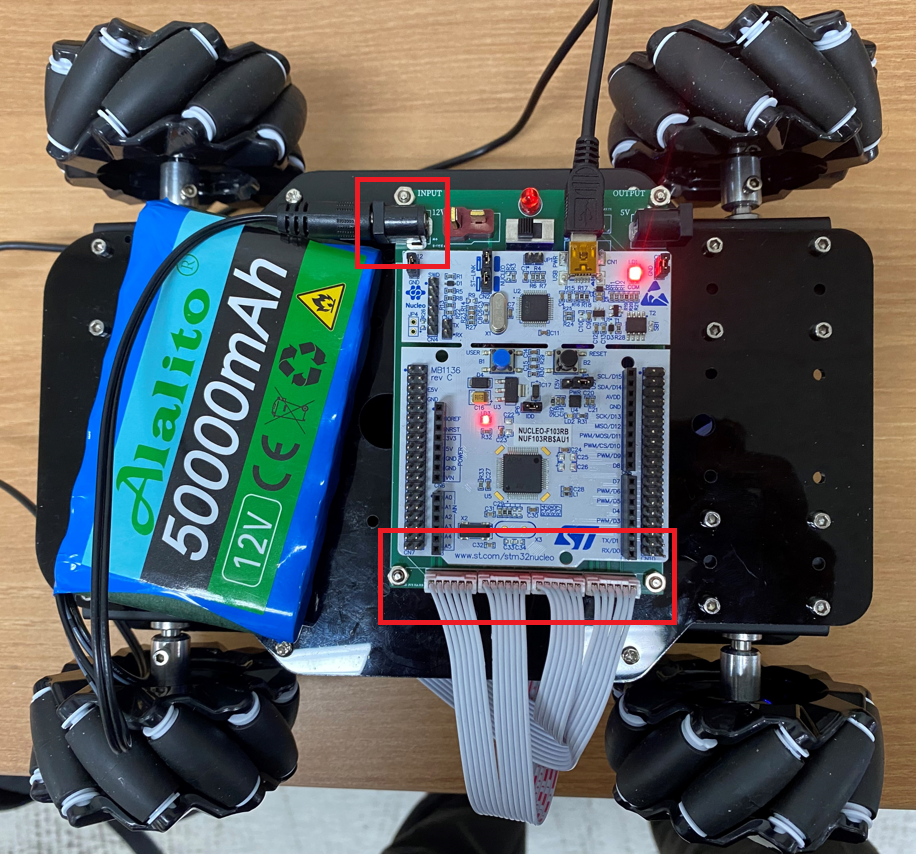
이번 과정은 STM32 보드와 추가로 제작된 확장보드 및 RC카 구동체를 이용해서 자동차를 제어하기 위한 간단한 프로그램을 만드는 과정의 세 번째로 확장보드의 모터 드라이버를 이용해 모터를 제어하는 과정입니다. 아래 과정은 이전 과정을 완료 후 진행하시길 추천드립니다. STM32 자동차 제어하기(1) - 기본환경 설정 STM32 자동차 제어하기(2) - LED / BUZZER 제어하기 모터를 제어하기 위해서는 아래 그림과 같이 12V 전원과 모터 구동체가 확장보드에 연결되어 있어야 합니다. 1. 통신규격 추가하기 기존에 정의한 통신 규격에 모터제어를 위한 명령을 추가합니다. 우선 아래 코드와 같이 bsp_uart.h 에 COMMAND 및 RESULT를 정의합니다. 0x03 CMD_MOTOR이 추가됐습니다..